
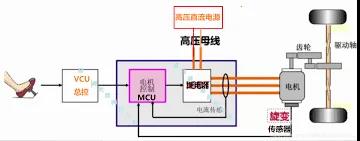
電機(jī)控制單元(MCU)是電動(dòng)汽車的核心電子模塊,它位于電池組和電機(jī)之間,負(fù)責(zé)根據(jù)駕駛者的油門輸入來(lái)控制車輛的速度和加速度。MCU的核心功能是通過(guò)電壓源逆變器(VSI)和脈寬調(diào)制(PWM)技術(shù),將電池提供的直流電轉(zhuǎn)換為交流電,驅(qū)動(dòng)電機(jī)工作。
這一過(guò)程中,MCU使用位置傳感器的反饋來(lái)生成PWM脈沖,通過(guò)調(diào)節(jié)開啟時(shí)間/占空比來(lái)控制電機(jī)速度和扭矩。為了實(shí)現(xiàn)高效和精確的電機(jī)控制,MCU采用了矢量控制方法/場(chǎng)定向控制(FOC),這種方法允許獨(dú)立控制扭矩和磁通,從而實(shí)現(xiàn)快速且高效的電機(jī)驅(qū)動(dòng)。
MCU(motor control unit)的基本功能主要包括:
-
電壓轉(zhuǎn)換:MCU將電池的直流電轉(zhuǎn)換為三相交流電,驅(qū)動(dòng)交流電機(jī),這一過(guò)程通過(guò)內(nèi)部逆變器實(shí)現(xiàn),使用半導(dǎo)體開關(guān)器件如晶體管或IGBT來(lái)控制電流的頻率和幅值。
-
速度與轉(zhuǎn)矩控制:MCU根據(jù)駕駛條件調(diào)整電機(jī)轉(zhuǎn)速和轉(zhuǎn)矩,以適應(yīng)不同的駕駛需求。
-
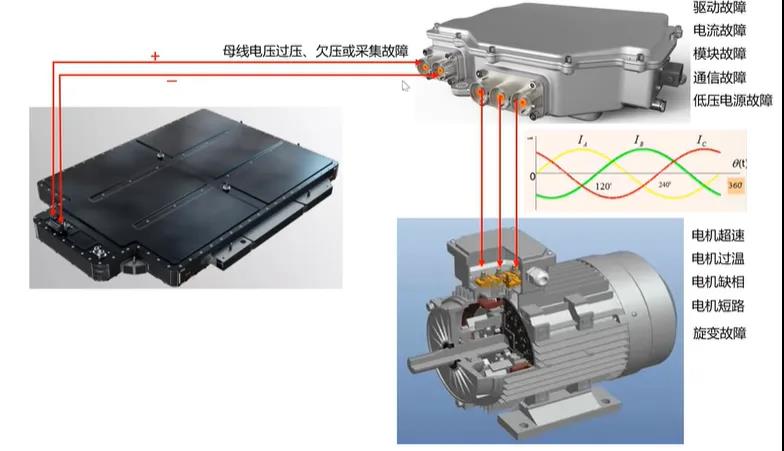
系統(tǒng)保護(hù):MCU具備多種保護(hù)機(jī)制,如電池輸入端保護(hù)、故障檢測(cè)、電機(jī)控制器本體故障保護(hù)、過(guò)載保護(hù)等,以確保系統(tǒng)的安全和穩(wěn)定運(yùn)行。
-
診斷與反饋:MCU能夠?qū)崟r(shí)監(jiān)測(cè)系統(tǒng)狀態(tài),向車輛的其他控制系統(tǒng)提供反饋,如電池狀態(tài)、電機(jī)溫度、控制器溫度等。
-
通信接口:MCU具備與其他系統(tǒng)(如電池管理系統(tǒng)BMS、車載信息娛樂(lè)系統(tǒng)等)的通信能力,實(shí)現(xiàn)數(shù)據(jù)共享和系統(tǒng)協(xié)同。
-
熱管理:MCU包含溫度傳感器和冷卻系統(tǒng),確保在高負(fù)載條件下維持適宜的工作溫度。
-
電磁兼容性:MCU設(shè)計(jì)考慮了電磁兼容性(EMC),以減少對(duì)車輛其他電子系統(tǒng)的影響。
-
模塊化設(shè)計(jì):MCU可能采用模塊化設(shè)計(jì),便于維護(hù)和升級(jí)。
-
啟動(dòng)/停止電機(jī):MCU能夠控制電機(jī)的啟動(dòng)和停止,啟動(dòng)時(shí)逐漸增加電流,停止時(shí)逐漸減少電流。
-
改變電機(jī)旋轉(zhuǎn)方向:MCU可以改變電流方向,從而改變電機(jī)旋轉(zhuǎn)方向。
-
再生制動(dòng):MCU在制動(dòng)過(guò)程中控制電機(jī)作為發(fā)電機(jī)運(yùn)行,將動(dòng)能轉(zhuǎn)換回電能存儲(chǔ)在電池中。
通過(guò)這些功能,MCU不僅確保了電動(dòng)汽車的高效運(yùn)行,還提高了駕駛的安全性和舒適性,是現(xiàn)代電動(dòng)汽車不可或缺的關(guān)鍵組件。
注:通過(guò)二極管的整流原理,制動(dòng)能量回收時(shí),將交流電轉(zhuǎn)換成直流電反充至電池中。
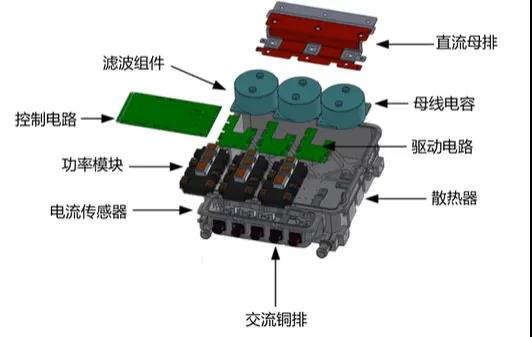
作為電動(dòng)汽車動(dòng)力傳動(dòng)系統(tǒng)的核心組件的電機(jī)控制器,其設(shè)計(jì)和功能依賴于一系列關(guān)鍵組件的協(xié)同工作。
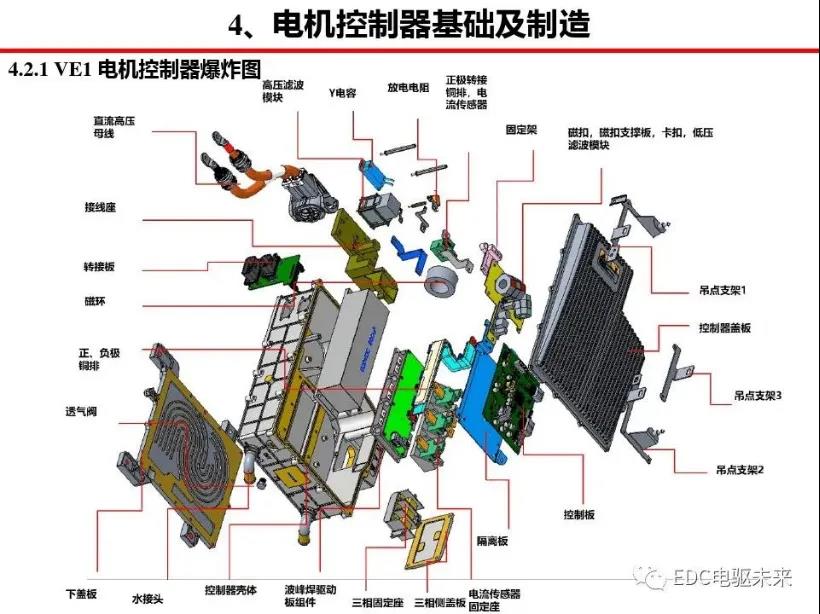
以下是電機(jī)控制器中的主要組件及其功能:
-
直流母排(busbar):直流母排是連接電池包和電機(jī)控制器的高導(dǎo)電性、低電阻、良好散熱特性的導(dǎo)體。它確保直流電從電池包無(wú)損耗或低損耗地傳輸?shù)诫姍C(jī)控制器。
-
逆變器結(jié)構(gòu):電機(jī)控制器的核心是一個(gè)三相全橋逆變器,負(fù)責(zé)將直流電轉(zhuǎn)換為三相交流電,驅(qū)動(dòng)交流電機(jī)。逆變器由多個(gè)功率半導(dǎo)體開關(guān)組成,通過(guò)精確控制這些開關(guān)的開通和關(guān)斷,實(shí)現(xiàn)對(duì)電機(jī)的精確控制。
-
電磁干擾(EMI)抑制:逆變器工作時(shí)產(chǎn)生的電磁干擾通過(guò)濾波組件如X電容和Y電容來(lái)減少。X電容和Y電容分別用于電源線路之間和電源線路與地之間的濾波,通常采用薄膜電容器或陶瓷電容器,并需符合特定的安全標(biāo)準(zhǔn)。
-
控制電路:控制電路是電機(jī)控制器的大腦,負(fù)責(zé)信號(hào)采集和控制算法實(shí)現(xiàn)。它通常包括微控制器或數(shù)字信號(hào)處理器(DSP)以及相關(guān)支持電路,其核心是功率模塊,負(fù)責(zé)電能轉(zhuǎn)換。
-
驅(qū)動(dòng)電路:驅(qū)動(dòng)電路為功率模塊中的開關(guān)器件提供驅(qū)動(dòng)信號(hào),確保它們能夠準(zhǔn)確、快速地開關(guān)。
-
散熱器:散熱器用于散發(fā)功率模塊產(chǎn)生的熱量,保持關(guān)鍵部件在適宜的工作溫度下運(yùn)行。
-
信號(hào)采集:電機(jī)控制器需要采集電機(jī)端的三相電流信號(hào)和位置信號(hào),以實(shí)現(xiàn)對(duì)電機(jī)狀態(tài)的實(shí)時(shí)監(jiān)測(cè)。這通常涉及到使用電流傳感器等硬件。
-
交流輸出銅排:電機(jī)控制器和電機(jī)之間的連接可能使用交流輸出銅排,以傳輸三相交流電。銅排設(shè)計(jì)需考慮低電阻和高電流承載能力。
-
旋變傳感器接口:電機(jī)的位置信號(hào)通常由旋變傳感器提供,這些傳感器需要與電機(jī)控制器的相應(yīng)接口連接。
-
電流傳感器集成:電流傳感器一般集成在電機(jī)控制器內(nèi)部,用于測(cè)量電機(jī)的電流,可采用霍爾效應(yīng)傳感器或空心穿孔式傳感器。
這些組件的協(xié)同工作確保了電機(jī)控制器能夠?qū)崿F(xiàn)對(duì)電動(dòng)汽車電機(jī)的精確控制,同時(shí)確保系統(tǒng)的安全性和可靠性。
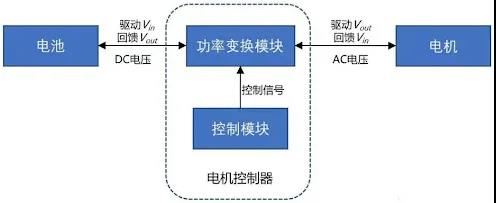
電機(jī)控制器(MCU)的設(shè)計(jì)原理如圖所示。
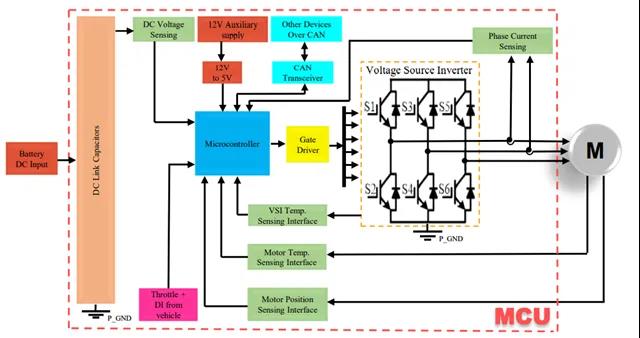
MCU主要由以下幾個(gè)模塊組成:
-
微控制器(Microcontroller):微控制器的核心功能是控制電壓源逆變器(VSI),將電池接收的電能轉(zhuǎn)換為所需的電能形式。它接收駕駛員的油門信號(hào)作為主要控制輸入,通過(guò)調(diào)整脈寬調(diào)制(PWM)脈沖的占空比來(lái)控制速度和扭矩。微控制器中實(shí)施的場(chǎng)向量控制(FOC)確保了電機(jī)控制的高效性和快速性。
-
電壓源逆變器(VSI):VSI負(fù)責(zé)將直流電轉(zhuǎn)換為交流電,以驅(qū)動(dòng)電機(jī)。通常使用六個(gè)MOSFET實(shí)現(xiàn)VSI,有時(shí)為了增加電流容量,也會(huì)使用MOSFET的并聯(lián)組合。
-
相電流感應(yīng)(Phase Current Sensing):使用基于霍爾效應(yīng)的電流傳感器來(lái)感應(yīng)電機(jī)的相電流,確保精確控制。通常使用兩個(gè)電流傳感器感應(yīng)兩個(gè)相電流,第三個(gè)相電流則由這兩個(gè)派生得出。
-
電源供應(yīng)(Power Supply):MCU內(nèi)置傳感器需要適當(dāng)?shù)碾娫垂?yīng)。此外,微控制器、電機(jī)溫度傳感器和位置反饋傳感器也需要不同級(jí)別的電源供應(yīng)。電源供應(yīng)部分將固定直流電壓轉(zhuǎn)換為所需的不同級(jí)別電壓。
-
柵極驅(qū)動(dòng)器(Gate Driver):柵極驅(qū)動(dòng)器電路用于放大微控制器產(chǎn)生的PWM脈沖的電壓水平,確保信號(hào)的有效傳遞。
-
CAN收發(fā)器(CAN Transceiver):CAN收發(fā)器用于驅(qū)動(dòng)和檢測(cè)通過(guò)CAN總線傳輸?shù)臄?shù)據(jù)。它將控制器使用的單端邏輯轉(zhuǎn)換為在CAN總線上傳輸?shù)牟罘中盘?hào)。
-
位置反饋傳感器:這些傳感器提供電機(jī)轉(zhuǎn)子的位置信息,對(duì)于實(shí)現(xiàn)精確的矢量控制至關(guān)重要。通常使用編碼器或旋變傳感器來(lái)提供這些反饋信號(hào)。
-
溫度傳感器:溫度傳感器用于監(jiān)測(cè)電機(jī)和控制器的溫度,以確保系統(tǒng)的安全運(yùn)行,防止過(guò)熱。
這些模塊的協(xié)同工作確保了電機(jī)控制器能夠高效、精確地控制電機(jī),同時(shí)確保系統(tǒng)的穩(wěn)定性和安全性。
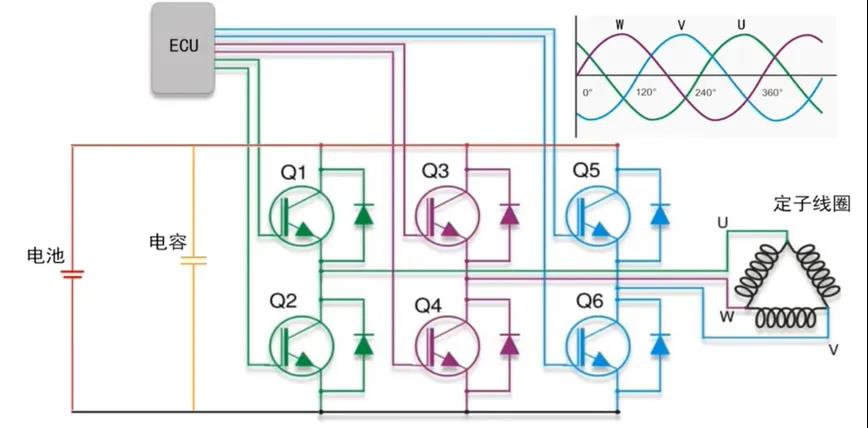
注:由于高效率和低成本,當(dāng)今絕大多數(shù)電動(dòng)汽?都采用基于絕緣柵雙極晶體管 (IGBT) 的三相電壓源逆變器 (VSI)。如圖所?,電池組可以直接連接到逆變器直流輸?(圖a),也可以使? DC/DC 升壓轉(zhuǎn)換器來(lái)升壓電池電壓并向逆 變器提供受控直流電壓(圖b)。
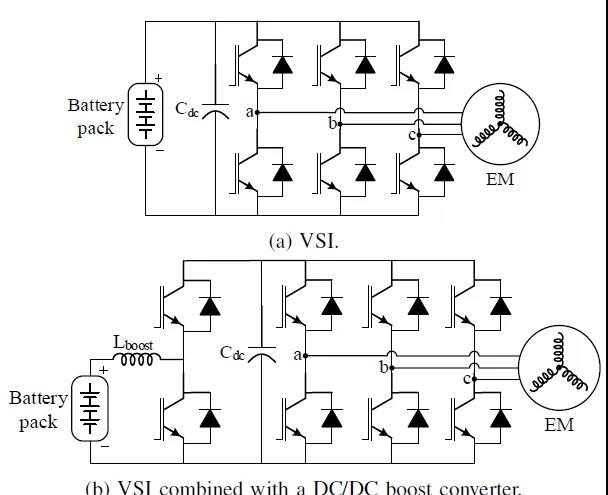
在這兩個(gè)電路中,都有?個(gè)?的直流母線電容器Cdc平滑有源器件開關(guān)動(dòng)作產(chǎn)?的紋波電流和電壓。這確保了?乎恒定的直流鏈路電壓并減少?頻電流諧波。升壓轉(zhuǎn)換器通常采?兩個(gè)開關(guān)器件實(shí)現(xiàn),因此它是雙向的,并且可以在再?制動(dòng)期間將能量返回到電池。通過(guò)并聯(lián)多個(gè)轉(zhuǎn)換器相,可以將該拓?fù)鋽U(kuò)展到更?的功率?平,如果使?交錯(cuò)控制,則具有減少紋波的優(yōu)點(diǎn)。VSI拓?fù)湫枰鶄€(gè)開關(guān),這些開關(guān)被調(diào)制以?成到 EM 的三相正弦輸出電流,由于采?單級(jí)轉(zhuǎn)換,圖a 所?的架構(gòu)成本低廉、易于制造,并且需要對(duì)開關(guān)器件進(jìn)?簡(jiǎn)單的控制。此外,過(guò)去??年來(lái),VSI在業(yè)界得到了深?研究和?泛應(yīng)?,使得這種拓?fù)浣Y(jié)構(gòu)成熟、穩(wěn)健、可靠。
純電動(dòng)汽車(BEVs)傾向于采用閉環(huán)的矢量控制(Field-Oriented Control, FOC)而非開環(huán)的變頻率控制,因?yàn)殚_環(huán)控制使用查找表而非反饋來(lái)實(shí)現(xiàn)僅低精度的速度控制。FOC雖然增加了配備轉(zhuǎn)子角度位置編碼器和相電流感應(yīng)器的成本,但它能夠在各種操作模式下建立必要的電場(chǎng)——如駐車保持、最大加速度、高速行駛、制動(dòng),甚至故障狀態(tài)。
逆變器還使用主動(dòng)短路(Active Short-Circuit, ASC)功能來(lái)處理故障,例如在高速行駛時(shí)進(jìn)行再生制動(dòng)以防止向電池輸送非常高的功率。ASC在接觸器斷開電路并保護(hù)電池所需的幾毫秒內(nèi)將電機(jī)相位短路。
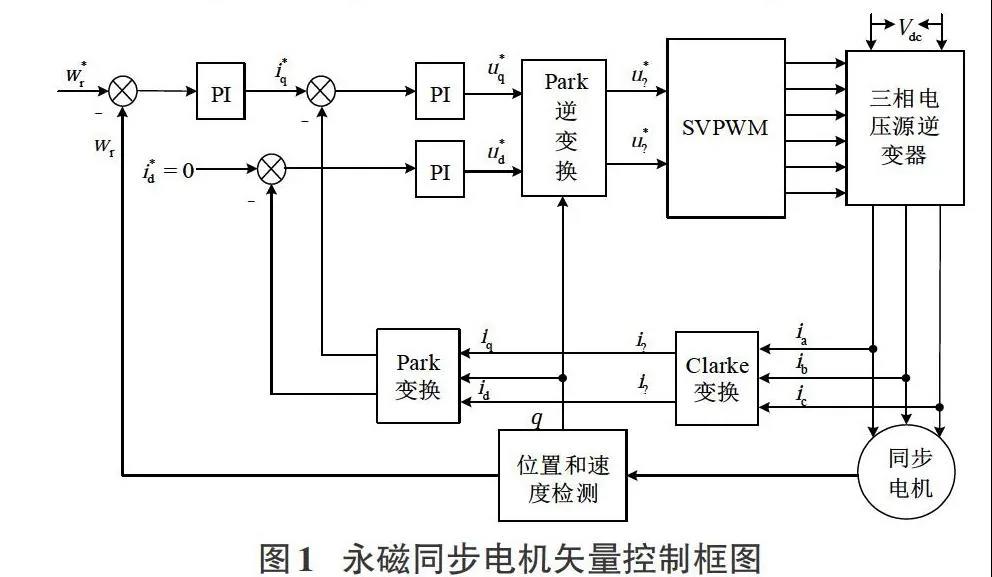
電機(jī)控制器的矢量控制邏輯框圖展示了其在電動(dòng)汽車動(dòng)力系統(tǒng)中高效運(yùn)作的關(guān)鍵環(huán)節(jié)。
以下是對(duì)電機(jī)控制器軟件控制邏輯的詳細(xì)討論:
-
直流電輸入管理:電池包提供的直流電首先輸入到三相逆變器,這是電機(jī)控制器中的功率轉(zhuǎn)換核心部分。直流輸入銅排負(fù)責(zé)電能的傳輸,而濾波組件則用于減少由于逆變器開關(guān)動(dòng)作產(chǎn)生的電磁干擾。
-
逆變器控制:逆變器將直流電轉(zhuǎn)換為三相交流電,以供給電機(jī)。軟件控制邏輯負(fù)責(zé)生成PWM(脈沖寬度調(diào)制)信號(hào),精確控制逆變器中功率半導(dǎo)體器件的開關(guān)順序和時(shí)間,從而調(diào)節(jié)輸出交流電的頻率和幅值。
-
控制電路:控制電路是電機(jī)控制器的中樞,負(fù)責(zé)實(shí)現(xiàn)復(fù)雜的控制算法。這些算法通常在微控制器或數(shù)字信號(hào)處理器(DSP)上運(yùn)行,用于處理信號(hào)采集的數(shù)據(jù),并生成相應(yīng)的PWM信號(hào)。
-
信號(hào)采集:電機(jī)控制器需要采集電機(jī)的三相電流(ia、ib、ic)和位置信號(hào)。這些信號(hào)對(duì)于實(shí)現(xiàn)精確的電機(jī)控制至關(guān)重要。電流傳感器和位置傳感器(如旋變傳感器)提供了必要的信息。
-
矢量控制算法:軟件實(shí)現(xiàn)矢量控制算法,這是一種先進(jìn)的控制策略,它將電機(jī)的電流分解為與磁場(chǎng)和轉(zhuǎn)矩相關(guān)的分量,允許對(duì)電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩進(jìn)行獨(dú)立控制。
-
電平轉(zhuǎn)換:由于微控制器的IO電平可能與驅(qū)動(dòng)電路的邏輯電平不匹配,軟件可能需要配合硬件實(shí)現(xiàn)電平轉(zhuǎn)換,以確保PWM信號(hào)能夠正確驅(qū)動(dòng)逆變器。
-
散熱器控制:軟件還可以控制散熱器的風(fēng)扇或其他冷卻機(jī)制,根據(jù)溫度傳感器的反饋來(lái)調(diào)節(jié)冷卻強(qiáng)度。
-
故障診斷:軟件包含故障檢測(cè)和診斷算法,能夠在檢測(cè)到異常情況時(shí)及時(shí)響應(yīng),采取保護(hù)措施。
-
通信管理:軟件負(fù)責(zé)管理與車輛其他系統(tǒng)的通信,如通過(guò)CAN總線接收來(lái)自整車控制器的指令,或向電池管理系統(tǒng)發(fā)送狀態(tài)信息。
-
用戶界面交互:軟件可能包含與車輛用戶界面的交互邏輯,以向駕駛員提供關(guān)于電機(jī)控制器狀態(tài)的信息。
-
自適應(yīng)控制:軟件可以實(shí)現(xiàn)自適應(yīng)控制算法,根據(jù)實(shí)時(shí)反饋?zhàn)詣?dòng)調(diào)整控制參數(shù),以適應(yīng)不同的駕駛條件和負(fù)載變化。
-
固件更新:軟件設(shè)計(jì)允許通過(guò)無(wú)線方式進(jìn)行固件更新,以修復(fù)已知問(wèn)題或引入新功能。
這些軟件控制邏輯的協(xié)同工作確保了電機(jī)控制器能夠高效、精確地控制電機(jī)的運(yùn)行,同時(shí)確保系統(tǒng)的安全性和可靠性。
此外,Park變換、d-q坐標(biāo)系和Clarke變換在電機(jī)控制中起著關(guān)鍵作用:
- Park變換:將三相靜止坐標(biāo)系轉(zhuǎn)換為與轉(zhuǎn)子磁通對(duì)齊的兩相旋轉(zhuǎn)坐標(biāo)系(d-q),簡(jiǎn)化了電機(jī)的動(dòng)態(tài)分析和控制策略的設(shè)計(jì)。
- d-q坐標(biāo)系:在d-q坐標(biāo)系中,電機(jī)的磁通和扭矩控制可以被解耦,允許獨(dú)立控制,對(duì)于實(shí)現(xiàn)精確和高效的電機(jī)控制非常重要。
- Clarke變換:將三相交流系統(tǒng)的變量轉(zhuǎn)換為兩個(gè)直交的兩相靜態(tài)坐標(biāo)系(α-β),用于分析和控制三相交流電機(jī),簡(jiǎn)化了控制算法的開發(fā),提高了電機(jī)系統(tǒng)的效率和性能。
這些變換和坐標(biāo)系的使用,使得電機(jī)控制算法能夠以類似于直流電機(jī)的方式對(duì)交流電機(jī)進(jìn)行控制,從而提高電機(jī)性能和效率。
注:逆變器產(chǎn)生的交流輸出電壓以及供給電機(jī)(EM)的電壓是通過(guò)脈沖寬度調(diào)制(PWM)技術(shù)生成的,該技術(shù)以一種期望的模式切換功率半導(dǎo)體器件。逆變器通過(guò)相電流和轉(zhuǎn)子位置反饋實(shí)現(xiàn)閉環(huán)控制,因此至少需要在逆變器中安裝兩個(gè)相電流傳感器,并且需要一個(gè)合適的接口來(lái)連接電機(jī)的解析器或編碼器。
-
正弦波脈沖寬度調(diào)制(SPWM): 由于其簡(jiǎn)單性,SPWM是工業(yè)中使用最廣泛的一種經(jīng)典技術(shù)。它最初是使用模擬電路開發(fā)的,但現(xiàn)在數(shù)字實(shí)現(xiàn)已成為標(biāo)準(zhǔn)程序。這種調(diào)制方案的一個(gè)缺點(diǎn)是其對(duì)直流鏈路電壓Vdc的使用有限,因?yàn)榛据敵鱿嚯妷旱淖畲蠓仁荲dc/2。此外,與其他技術(shù)相比,這種方法在線路電壓中產(chǎn)生相對(duì)較高的總諧波畸變 (THD),導(dǎo)致更高的諧波損耗。
-
空間矢量脈寬調(diào)制(SVPWM):盡管計(jì)算要求更為復(fù)雜,但隨著數(shù)字信號(hào)處理器(DSP)和微控制器的廣泛采用,SVPWM因其低成本實(shí)現(xiàn)而變得越來(lái)越流行。SVPWM通過(guò)生成比SPWM更低的總諧波畸變(THD),從而提高逆變器和電機(jī)(EM)的效率,實(shí)現(xiàn)了更好的性能。此外,相電壓的基本幅度最大值等于Vdc/√3,這比SPWM方法在線性區(qū)域大約高出15%。因此,SVPWM實(shí)現(xiàn)了更好的直流鏈路利用,通過(guò)在過(guò)調(diào)制區(qū)域的六步操作,這一利用甚至可以進(jìn)一步擴(kuò)展。

盡管很難確定每種電動(dòng)汽車(EV)的牽引逆變器使用哪種調(diào)制策略,但人們普遍認(rèn)為由于其性能優(yōu)勢(shì),空間矢量脈寬調(diào)制(SVPWM)更受青睞,它允許過(guò)調(diào)制以減弱正弦波的頂部,以便可以施加高于直流母線電壓的電壓,并通過(guò)電機(jī)驅(qū)動(dòng)更大的電流。這個(gè)方案還最小化了逆變器中的六個(gè)開關(guān)的開關(guān)轉(zhuǎn)換,從而降低了開關(guān)損耗并提高了效率。
電機(jī)控制器的硬件電路框圖揭示了其在設(shè)計(jì)和實(shí)現(xiàn)中涉及的精密電子工程和電力電子技術(shù)。
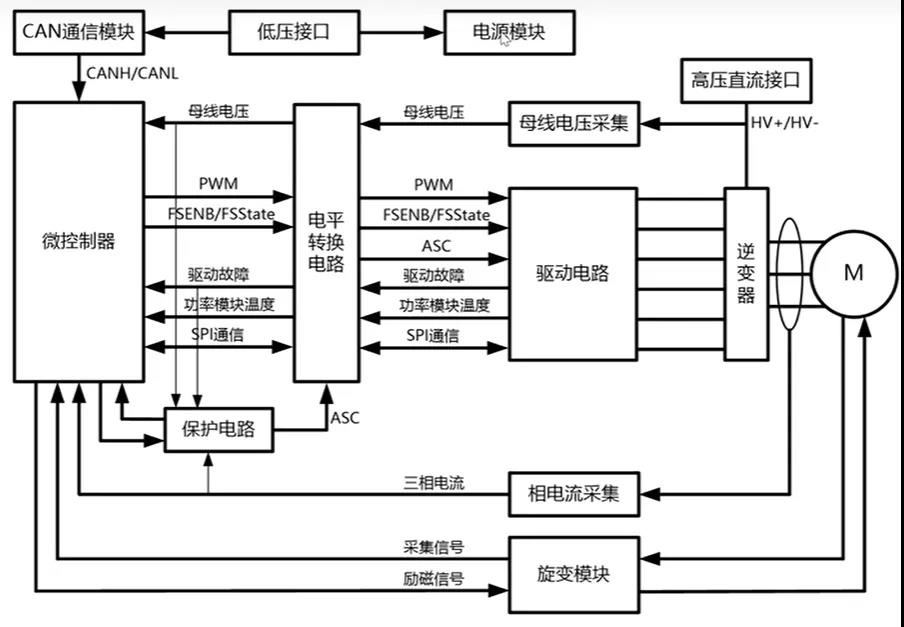
以下是電機(jī)控制器硬件方面的詳細(xì)討論:
-
信號(hào)采集:電機(jī)端的電流和位置信號(hào)是電機(jī)控制的基礎(chǔ)。電流信號(hào)通常由集成在電機(jī)控制器內(nèi)部的電流傳感器采集,而位置信號(hào)則由旋變傳感器提供,這些傳感器能夠精確測(cè)量電機(jī)轉(zhuǎn)子的位置和速度。
-
控制電路:控制電路是電機(jī)控制器的中樞,它負(fù)責(zé)處理采集到的信號(hào),并通過(guò)軟件算法生成PWM波形來(lái)驅(qū)動(dòng)逆變器。控制電路通常包括微控制器或數(shù)字信號(hào)處理器(DSP),以及相關(guān)的支持電路。
-
電平轉(zhuǎn)換:由于微控制器的輸出電平可能與驅(qū)動(dòng)電路的邏輯電平不匹配,因此需要電平轉(zhuǎn)換電路來(lái)確保PWM信號(hào)能夠正確地驅(qū)動(dòng)功率模塊。
-
逆變器驅(qū)動(dòng):PWM波形直接驅(qū)動(dòng)三相全橋逆變器中的功率模塊,這些功率模塊負(fù)責(zé)將直流電轉(zhuǎn)換為交流電,以供給電機(jī)。逆變器的驅(qū)動(dòng)信號(hào)需要精確和快速,以確保電機(jī)的高效運(yùn)行。
-
環(huán)路構(gòu)成:從信號(hào)采集到控制算法的實(shí)現(xiàn),再到控制電路的結(jié)構(gòu),整個(gè)系統(tǒng)構(gòu)成了一個(gè)緊密的環(huán)路,確保了系統(tǒng)的穩(wěn)定性和響應(yīng)速度。
-
CAN通訊模塊:電機(jī)控制器通過(guò)CAN通訊模塊接收來(lái)自整車控制模塊或域控制器的指令,這些指令用于控制電機(jī)的輸出扭矩和運(yùn)行狀態(tài)。
-
低壓接口:低壓接口是電機(jī)控制器中的一個(gè)物理實(shí)體,它連接整車小電瓶和CAN通訊回路,負(fù)責(zé)信號(hào)和能量的傳輸,并為電機(jī)控制器板子供電。
-
電源模塊:電源模塊負(fù)責(zé)為控制器上不同電壓要求的芯片和控制模塊提供穩(wěn)定的供電。例如,微控制器可能需要3.3V或5V的IO電平,內(nèi)核電壓可能是1.3V,而驅(qū)動(dòng)電路可能是5V電平,信號(hào)采集電路如旋變模塊可能是12V。
-
電機(jī)與控制器的連接:電機(jī)與電機(jī)控制器之間的連接通常包括三相銅排,用于傳輸三相交流電,以及旋變傳感器的接口,用于提供電機(jī)的位置和速度信息。
-
電流傳感器集成:電流傳感器通常集成在電機(jī)控制器內(nèi)部,采用霍爾效應(yīng)原理或空心穿孔式設(shè)計(jì),以非侵入性的方式測(cè)量電機(jī)的電流。
-
旋變傳感器:速度和位置的檢測(cè)通常依賴于旋變傳感器,它能夠提供電機(jī)轉(zhuǎn)子的位置信息,這對(duì)于實(shí)現(xiàn)精確的矢量控制至關(guān)重要。
通過(guò)這些硬件組件的設(shè)計(jì)和集成,電機(jī)控制器能夠?qū)崿F(xiàn)對(duì)電動(dòng)汽車電機(jī)的精確控制,同時(shí)確保系統(tǒng)的安全性和可靠性。這些組件的協(xié)同工作體現(xiàn)了電機(jī)控制器在現(xiàn)代電動(dòng)汽車動(dòng)力系統(tǒng)中的核心作用。
